| |
|
| |
Abstract |
| |
|
| |
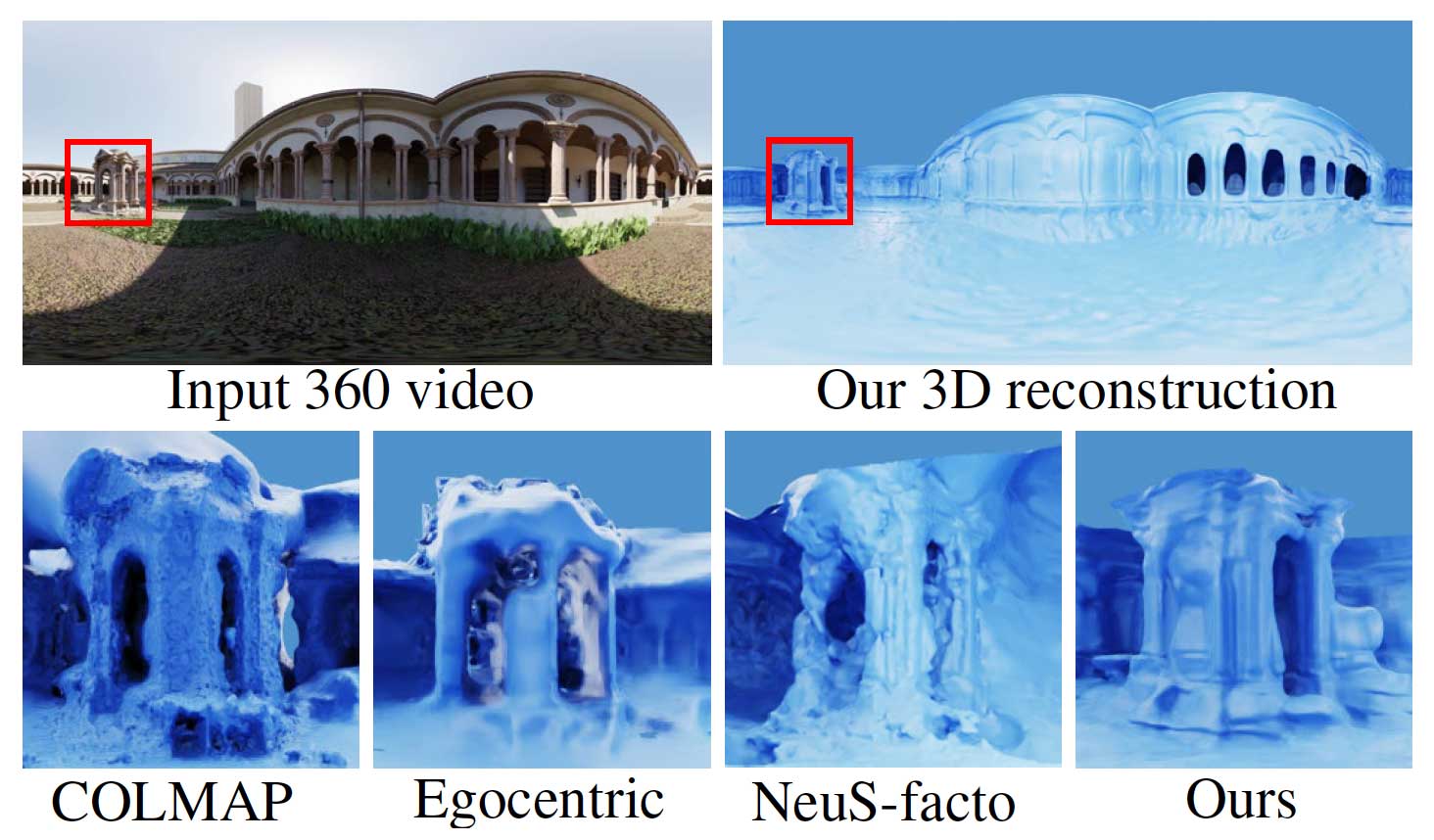
We present a method to reconstruct indoor and outdoor static scene geometry and appearance from an omnidirectional video moving in a small circular sweep. This setting is challenging because of the small baseline and large depth ranges, making it difficult to find ray crossings. To better constrain the optimization, we estimate geometry as a signed distance field within a spherical binoctree data structure and use a complementary efficient tree traversal strategy based on a breadth-first search for sampling. Unlike regular grids or trees, the shape of this structure well-matches the camera setting, creating a better memory-quality trade-off. From an initial depth estimate, the binoctree is adaptively subdivided throughout the optimization; previous methods use a fixed depth that leaves the scene undersampled. In comparison with three neural optimization methods and two non-neural methods, ours shows decreased geometry error on average, especially in a detailed scene, while significantly reducing the required number of voxels to represent such details.
|
| |
|
|
| |
|
| |
|
| |
@InProceedings{Kim_2024_CVPR,
author = {Hakyeong Kim and Andreas Meuleman and Hyeonjoong Jang and
James Tompkin and Min H. Kim},
title = {OmniSDF: Scene Reconstruction using
Omnidirectional Signed Distance Functions and Adaptive Binoctrees},
booktitle = {IEEE Conference on Computer Vision and
Pattern Recognition (CVPR)},
month = {June},
year = {2024}
}
|
|
|